西克视觉引导机器人导航方案:精准定位赋能工业机器人智能化
在工业机器人应用场景中,工件抓取定位精度直接影响生产效率与质量。德国西克(SICK)推出的传感器驱动机器人导航解决方案,通过视觉传感技术实现机器人对工件的毫米级精准定位,为汽车制造、物流分拣等场景提供高效可靠的自动化升级方案。
一、场景痛点:传统机器人定位的精度与柔性瓶颈
工业机器人传统定位方式面临以下挑战:
人工示教效率低:依赖手动编程设定抓取点,单工位调试耗时 2-4 小时,多品种换型需重复调试;
定位误差显著:机械工装定位偏差达 ±1mm 以上,易导致抓取偏移、工件碰撞等问题;
复杂工况适配难:工件来料位置波动、表面反光等因素影响定位可靠性,尤其在汽车轮胎、轮毂等曲面工件场景中问题突出。
西克基于视觉传感器的非接触式定位技术,有效解决上述痛点,实现机器人 “即视即定位” 的智能作业。
二、西克解决方案:视觉引导下的精准定位技术
核心技术亮点:
1.Inspector 系列视觉传感器
高分辨率成像系统实时捕捉工件特征点(如轮胎螺钉孔、轮毂安装位),定位精度达 ±0.3mm;
支持工件模型离线示教,通过深度学习算法适应不同批次工件的位置偏差,重复定位精度≤±0.1mm。
2.智能数据交互系统
支持 Profinet、EtherNet/IP 等工业协议,实时传输定位数据至机器人控制器;
内置动态补偿算法,自动修正机器人运动轨迹,适配工件来料位置波动(±5mm 范围内自动校准)。
方案价值:
- 机器人抓取效率提升 50%,单工位调试时间缩短至 30 分钟内;
- 定位误差控制在 ±0.5mm 以内,工件损坏率降低 90%;
- 支持多品种工件混线生产,换型时间从 2 小时压缩至 15 分钟。
三、典型应用场景
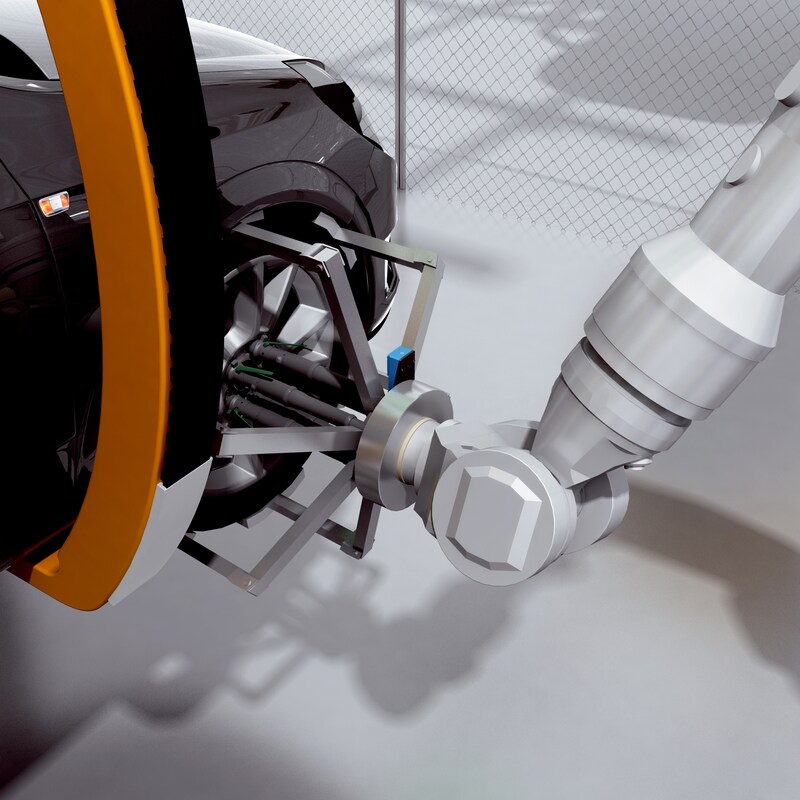
1.汽车轮胎智能装配
精准定位轮毂螺钉孔位置,引导机器人自动完成轮胎安装,适配不同车型轮毂规格;
2.3C 产品精密抓取
识别手机背板螺丝孔、电子元件焊点,实现微米级精准抓取,满足半导体封装等精密工艺需求;
3.物流分拣动态定位
对输送带上的异形包裹进行实时定位,引导机器人高速分拣,处理效率达 2000 件 / 小时。
以下产品系列可以使用
Inspector系列
VSPI-2F111
VSPI-2F121
VSPI-4F2111
VSPI-4F2311
VSPl-4F2411
VSPP-5F2113
VSPP-5F2413
VSPP-5F2134
VSPM-6B2113
VSPM-6B2413
VSPM-6F2113
VSPM-6F2113S19
VSPM-6F2313
VSPM-6F2313S20
VSPM-6B2413 Universal Robots Kit
